Broadcom eCos | Reversing Interrupt and Exception Handling
In this article I’ll go through the different steps I followed when trying to understand the interrupt and exception handling on eCos. I initially wanted to cover this material in the Reversing eCos Memory Layout article but I started to divert too much from actual memory mappings.
While it may not be quite clear now, documenting this will be helpful in the future. It will be a time saver when reversing firmware files given that you’ll have a clear memory map, and will provide the necessary background when thinking about persistent backdoor mechanisms, custom code injection, or even building your own eCos debugger.
By reading the eCos source code for MIPS and doing some research into dedicated vectors, I identified the following locations:
| Vector/Table | Address |
|---|---|
| Common Vector | 0x80000000 |
| Stub Entry Vector | 0x80000100 |
| Debug Vector | 0x80000200 |
| Virtual Service Routine Table | 0x80000300 |
| Virtual Vector Table | 0x80000400 |
Let’s go through each of these locations one by one.
Common Vector (0x80000000)
The CPU delivers all exceptions, whether synchronous faults or asynchronous interrupts, to a set of hardware defined vectors. Depending on the architecture, these may be implemented in a number of different ways.
With such a wide variety of hardware approaches, it is not possible to provide a generic mechanism for the substitution of exception vectors directly. Therefore, eCos translates all of these mechanisms in to a common approach that can be used by portable code on all platforms.
On MIPS, most exceptions and all interrupts are vectored to a single address at either 0x80000000 or 0xBFC00180. Software is responsible for reading the exception code from the CPU cause register to discover its true source. One of the exception codes in the cause register indicates an external interrupt. Additional bits in the cause register provide a first-level decode for the interrupt source, one of which represents an architecture defined timer.
Source: https://ecos.sourceware.org/ecos/docs-latest/ref/hal-vectors-and-vsrs.html
The mechanism implemented is to attach to each hardware vector a short piece of trampoline code that makes an indirect jump via a table to the actual handler for the exception. This handler is called the Vector Service Routine (VSR) and the table is called the VSR table.
The trampoline code performs the absolute minimum processing necessary to identify the exception source, and jump to the VSR. The VSR is then responsible for saving the CPU state and taking the necessary actions to handle the exception or interrupt. The entry conditions for the VSR are as close to the raw hardware exception entry state as possible - although on some platforms the trampoline will have had to move or reorganize some registers to do its job.
Let’s read the content at offset 0x80000000:
CM> read_memory -n 32 0x80000000
80000000: 40 1a 68 00 00 00 00 00 33 5a 00 7f 3c 1b 80 00 | @.h.....3Z..<...
80000010: 27 7b 03 00 03 7a d8 20 8f 7b 00 00 03 60 00 08 | '{...z. .{...`..By disassembling the obtained bytes, we uncover the trampoline code:
rasm2 -a mips -b 32 -e -d '401a680000000000335a007f3c1b8000277b0300037ad8208f7b000003600008'
mfc0 k0, t5, 0 ; move from coprocessor 0 into $k0
nop ; no operation
andi k0, k0, 0x7f ; $k0 = $k0 ^ 0x7f
lui k1, 0x8000 ; $k1 = 0x80000000
addiu k1, k1, 0x300 ; $k1 = 0x80000300
add k1, k1, k0 ; $k1 = $k1 + $k0
lw k1, (k1) ; $k1 = *$k1
jr k1 ; jump and register to $k1It’s a perfect match for this piece of assembly from eCos 2.0 source:
FUNC_START(other_vector)
mfc0 k0,cause # K0 = exception cause
nop
andi k0,k0,0x7F # isolate exception code
la k1,hal_vsr_table # address of VSR table
add k1,k1,k0 # offset of VSR entry
lw k1,0(k1) # k1 = pointer to VSR
jr k1 # go there
nop # (delay slot)
FUNC_END(other_vector)The code isolate the exception code and use it as an index for the virtual service routine table. From the trampoline code we disassembled, we know the VSR table starts at offset 0x80000300.
The hal_vsr_table is defined in assembly in ./packages/hal/mips/arch/v2_0/src/vectors.S. We can see that it has 16 entries (64 / 4).
## .section ".vsr_table","a"
.data
.globl hal_vsr_table
hal_vsr_table:
.long __default_interrupt_vsr
.rept 63
.long __default_exception_vsr
.endr
#endifLet’s read 64 bytes starting from offset 0x80000300:
Console/vendor> read_memory -n 64 0x80000300
80000300: 80 00 43 ec 80 00 4b d8 80 00 4b d8 80 00 4b d8 | ..C...K...K...K.
80000310: 80 00 4b d8 80 00 4b d8 80 00 4b d8 80 00 4b d8 | ..K...K...K...K.
80000320: 80 00 4b d8 80 00 4b d8 80 00 4b d8 80 00 4b d8 | ..K...K...K...K.
80000330: 80 00 4b d8 80 00 4b d8 80 00 4b d8 80 00 4b d8 | ..K...K...K...K.The virtual service routine table is a table with 16 entries, each of them pointing to a specific function. By comparing the disassembly and the actual assembly from ./packages/hal/mips/arch/v2_0/src/vectors.S, I was able to precisely identify the functions:
- 0x800043ec - __default_interrupt_vsr
- 0x80004bd8 - __default_exception_vsr
To fully understand how the trampoline index the VSR table, I wrote the following Python snippet:
#!/usr/bin/env python3
for i in range(0x7f, 0, -4):
k = (i ^ 0x7f) >> 2
offset = 0x80000300 + (i ^ 0x7f)
if 0x80000340 > offset and offset >= 0x80000300:
print("{} - 0x{:0x}".format(k, offset))
elif offset >= 0x80000380 and 80000390 >= offset:
print("{} - 0x{:0x}".format(k, offset))Executing the code will give us the following output:
python3 vsr_id.py
0 - 0x80000300
1 - 0x80000304
2 - 0x80000308
3 - 0x8000030c
4 - 0x80000310
5 - 0x80000314
6 - 0x80000318
7 - 0x8000031c
8 - 0x80000320
9 - 0x80000324
10 - 0x80000328
11 - 0x8000032c
12 - 0x80000330
13 - 0x80000334
14 - 0x80000338
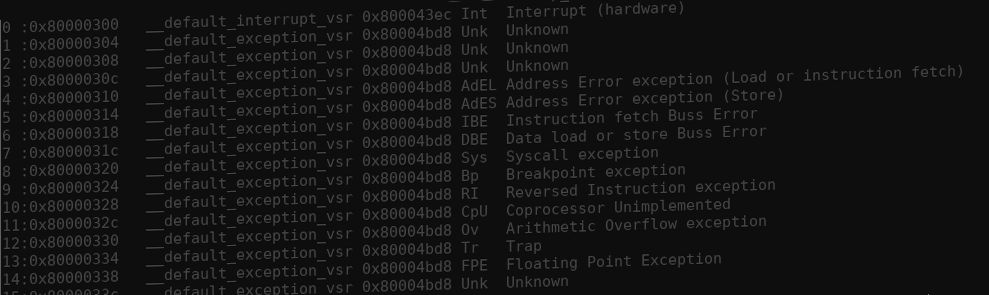
15 - 0x8000033cAs we can see, the only valid exception codes that index within the VSR table are values between 0 and 15 included. These are valid exception codes that we can find in the MIPS documentation:
| Exception code | Name | Cause of exception |
|---|---|---|
| 0 | Int | Interrupt (hardware) |
| 1 | Unk | Unknown |
| 2 | Unk | Unknown |
| 3 | Unk | Unknown |
| 4 | AdEL | Address Error exception (Load or instruction fetch) |
| 5 | AdES | Address Error exception (Store) |
| 6 | IBE | Instruction fetch Buss Error |
| 7 | DBE | Data load or store Buss Error |
| 8 | Sys | Syscall exception |
| 9 | Bp | Breakpoint exception |
| 10 | RI | Reversed Instruction exception |
| 11 | CpU | Coprocessor Unimplemented |
| 12 | Ov | Arithmetic Overflow exception |
| 13 | Tr | Trap |
| 14 | FPE | Floating Point Exception |
| 15 | Unk | Unknown |
Please note that item 1, 2, 3, and 15 are undocumented.
An interesting fact is that, due to the way eCos firmwares are compiled and assembled, the location of __default_interrupt_vsr and __default_exception_vsr is the same for all firmwares based on the Broadcom variant of eCos.
The following piece of code takes advantage of that fact and gather the VSR information from a live system over a serial connection. You can find the code in the dedicated repo.
#!/usr/bin/env python3
'''
Dump the virtual service routine table information from a live eCos BFC device.
You must have a serial connection on /dev/ttyUSB0 to either a CM> or RG> shell.
Author: Quentin Kaiser <quentin@ecos.wtf>
'''
import serial
import re
VSR_ADDR = 0x80000300
VSR_NAMES = {
0x800043ec: "__default_interrupt_vsr",
0x80004bd8: "__default_exception_vsr",
0x800042e0: "__default_exception_vsr"
}
CAUSES = [
"Int - Interrupt (hardware)",
"Unk - Unknown",
"Unk - Unknown",
"Unk - Unknown",
"AdEL - Address Error exception (Load or instruction fetch)",
"AdES - Address Error exception (Store)",
"IBE - Instruction fetch Buss Error",
"DBE - Data load or store Buss Error",
"Sys - Syscall exception",
"Bp - Breakpoint exception",
"RI - Reversed Instruction exception",
"CpU - Coprocessor Unimplemented",
"Ov - Arithmetic Overflow exception",
"Tr - Trap",
"FPE - Floating Point Exception",
"Unk - Unknown"
]
def dump_vector_table():
with serial.Serial() as ser:
ser.baudrate = 115200
ser.port = '/dev/ttyUSB0'
ser.open()
ser.write(b"\n")
ser.readline()
for i in range(0, 0x10):
offset = VSR_ADDR + (i * 4)
ser.write(
"read_memory -n 4 0x{:0x}\n"\
.format(offset)\
.encode('utf-8')
)
ser.readline() # echo
ser.readline() # newline
output = ser.readline() # content
ser.readline() # newline
match = re.findall(b"[0-9-a-f]{8}: ([0-9-a-f ]{11})",output)
address = int(match[0].replace(b" ", b"").decode('utf-8'), 16)
if address in VSR_NAMES:
name = VSR_NAMES[address]
else:
name = "UNKNOWN"
print(
"{}: 0x{:0x}\t{:<5}0x{:0x} {}".format(
i,
offset,
name,
address,
CAUSES[i]
)
)
if __name__ == "__main__":
dump_vector_table()Running the code against a Netgear CG3700B device:
python3 dump_vsr.py
0: 0x80000300 __default_interrupt_vsr 0x800043ec
1: 0x80000304 __default_exception_vsr 0x80004bd8
2: 0x80000308 __default_exception_vsr 0x80004bd8
3: 0x8000030c __default_exception_vsr 0x80004bd8
4: 0x80000310 __default_exception_vsr 0x80004bd8
5: 0x80000314 __default_exception_vsr 0x80004bd8
6: 0x80000318 __default_exception_vsr 0x80004bd8
7: 0x8000031c __default_exception_vsr 0x80004bd8
8: 0x80000320 __default_exception_vsr 0x80004bd8
9: 0x80000324 __default_exception_vsr 0x80004bd8
10: 0x80000328 __default_exception_vsr 0x80004bd8
11: 0x8000032c __default_exception_vsr 0x80004bd8
12: 0x80000330 __default_exception_vsr 0x80004bd8
13: 0x80000334 __default_exception_vsr 0x80004bd8
14: 0x80000338 __default_exception_vsr 0x80004bd8
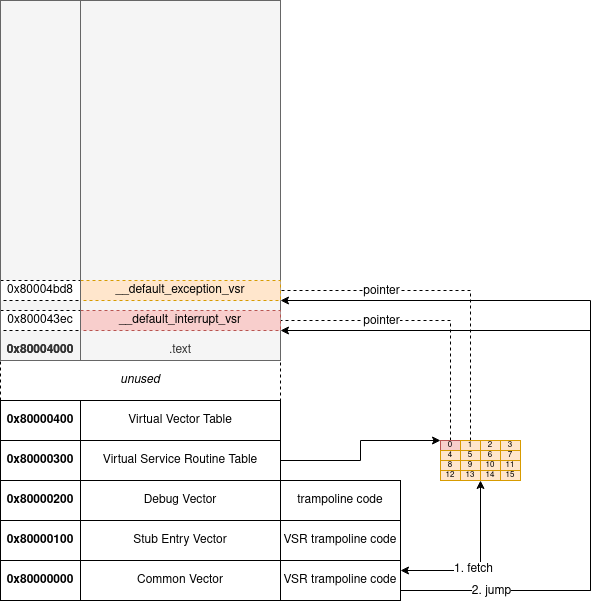
15: 0x8000033c __default_exception_vsr 0x80004bd8The visual representation below should help you understand how all these different components interact with each other:
__default_interrupt_vsr
An annotated version of __default_interrupt_vsr assembly is provided below to help you dig even more into the subject.
MIPS exceptions are handled by a peripheral device to the CPU called coprocessor 0 (cp0). Coprocessor 0 contains a number of registers used to configure exception handling and to report the status of current exceptions.
__default_interrupt_vsr:
; save ALL registers to the stack, including Hi and Low
800043ec 03 a0 d8 21 move k1,sp
800043f0 23 bd fe b0 addi sp,sp,-0x150
800043f4 af ba 00 88 sw k0,0x88(sp)
800043f8 af a0 00 00 sw zero,0x0(sp)
800043fc af a1 00 04 sw at,0x4(sp)
80004400 af a2 00 08 sw v0,0x8(sp)
80004404 af a3 00 0c sw v1,0xc(sp)
80004408 af a4 00 10 sw a0,0x10(sp)
8000440c af a5 00 14 sw a1,0x14(sp)
80004410 af a6 00 18 sw a2,0x18(sp)
80004414 af a7 00 1c sw a3,0x1c(sp)
80004418 af a8 00 20 sw t0,0x20(sp)
8000441c af a9 00 24 sw t1,0x24(sp)
80004420 af aa 00 28 sw t2,0x28(sp)
80004424 af ab 00 2c sw t3,0x2c(sp)
80004428 af ac 00 30 sw t4,0x30(sp)
8000442c af ad 00 34 sw t5,0x34(sp)
80004430 af ae 00 38 sw t6,0x38(sp)
80004434 af af 00 3c sw t7,0x3c(sp)
80004438 af b0 00 40 sw s0,0x40(sp)
8000443c af b1 00 44 sw s1,0x44(sp)
80004440 af b2 00 48 sw s2,0x48(sp)
80004444 af b3 00 4c sw s3,0x4c(sp)
80004448 af b4 00 50 sw s4,0x50(sp)
8000444c af b5 00 54 sw s5,0x54(sp)
80004450 af b6 00 58 sw s6,0x58(sp)
80004454 af b7 00 5c sw s7,0x5c(sp)
80004458 af b8 00 60 sw t8,0x60(sp)
8000445c af b9 00 64 sw t9,0x64(sp)
80004460 af bc 00 70 sw gp,0x70(sp)
80004464 af be 00 78 sw s8,0x78(sp)
80004468 af bf 00 7c sw ra,0x7c(sp)
8000446c 00 00 20 10 mfhi a0
80004470 00 00 28 12 mflo a1
80004474 af a4 00 80 sw a0,0x80(sp)
80004478 af a5 00 84 sw a1,0x84(sp)
8000447c af bb 00 74 sw k1,0x74(sp)
; move values from coprocessor 0 into $t1-$t$3
80004480 40 09 60 00 mfc0 t1,Status
80004484 40 0a 38 00 mfc0 t2,HWREna
80004488 40 0b 70 00 mfc0 t3,EPC
; ; save values $t1-$t3 onto the stack
8000448c af a9 00 8c sw t1,0x8c(sp)
80004490 af aa 00 94 sw t2,0x94(sp)
80004494 af ab 00 90 sw t3,0x90(sp)
; set global pointer ($gp) to 0x81971b10
80004498 3c 1c 81 97 lui gp,0x8197
8000449c 27 9c 1b 10 addiu gp,gp,0x1b10
; $v0 = 0x81925168
800044a0 3c 02 81 92 lui v0,0x8192
800044a4 24 42 51 68 addiu v0,v0,0x5168
$a0 = ($v0); $a0 += 1; ($v0) = $a0
800044a8 8c 44 00 00 lw a0,0x0(v0)=>DAT_81925168 = 00000001h
800044ac 20 84 00 01 addi a0,a0,0x1
800044b0 ac 44 00 00 sw a0,0x0(v0)=>DAT_81925168 = 00000001h
800044b4 03 a0 80 21 move s0,sp
; $a0 = stack top (0x8196b470)
; $a1 = stack base (0x8196a470)
; $a3 = sp - base
; # not on interrupt stack if < 0
; delay slot
800044b8 3c 04 81 97 lui a0,0x8197
800044bc 24 84 b4 70 addiu a0,a0,-0x4b90
800044c0 24 85 f0 00 addiu a1,a0,-0x1000
800044c4 03 a5 38 22 sub a3,sp,a1
800044c8 04 e0 00 04 bltz a3,LAB_800044dc
800044cc 00 00 00 00 _nop
; t0 = top - sp
; already on interrupt stack if > 0
; delay slot
800044d0 00 9d 40 22 sub t0,a0,sp
800044d4 1d 00 00 02 bgtz t0,LAB_800044e0
800044d8 00 00 00 00 _nop
; switch to interrupt stack
; space for old SP (8 to keep dword alignment!)
; save old SP on stack
800044dc 00 80 e8 21 move sp,a0
800044e0 23 bd ff f8 addi sp,sp,-0x8
800044e4 af b0 00 00 sw s0,0x0(sp)=>DAT_8196b468
; make a null frame
800044e8 27 bd ff e0 addiu sp,sp,-0x20
; hal_intc_decode
; Decode external interrupt via interrupt controller
800044ec 40 03 60 00 mfc0 v1,Status
800044f0 00 00 00 00 nop
800044f4 40 02 68 00 mfc0 v0,Cause
800044f8 00 00 00 00 nop
800044fc 00 43 10 24 and v0,v0,v1
80004500 00 02 12 02 srl v0,v0,0x8
80004504 30 42 00 ff andi v0,v0,0xff
80004508 3c 03 80 00 lui v1,0x8000
8000450c 24 63 46 a0 addiu v1,v1,0x46a0
80004510 00 43 10 20 add v0,v0,v1
80004514 80 52 00 00 lb s2,0x0(v0)=>DAT_800046a0
; hal_intc_translate
; Here, s2 contains the number of the interrupt being serviced,
; we need to derive from that the vector number to call in the ISR
; table.
80004518 02 40 88 21 move s1,s2
; s1 = byte offset of vector
8000451c 00 11 88 80 sll s1,s1,0x2
; reenable exceptions
80004520 40 02 60 00 mfc0 v0,Status
80004524 3c 03 ff ff lui v1,0xffff
80004528 34 63 ff f0 ori v1,v1,0xfff0
8000452c 00 43 10 24 and v0,v0,v1
80004530 40 82 60 00 mtc0 v0,Status,0x0
80004534 00 00 00 00 nop
80004538 00 00 00 00 nop
8000453c 00 00 00 00 nop
; $t2 = 0x8137c730 (hal_interrupt_handler, handler table)
80004540 3c 0a 81 38 lui t2,0x8138
80004544 25 4a c7 30 addiu t2,t2,-0x38d0
; address of ISR ptr
80004548 01 51 50 20 add t2,t2,s1
; ISR pointer
8000454c 8d 4a 00 00 lw t2,0x0(t2)=>->FUN_80e2c5d0 = 80e2c5d0
; $a1 = 0x8137c750 (hal_interrupt_data)
80004550 3c 05 81 38 lui a1,0x8138
80004554 24 a5 c7 50 addiu a1,a1,-0x38b0
; address of data ptr
80004558 00 b1 28 20 add a1,a1,s1
; data pointer
8000455c 8c a5 00 00 lw a1,0x0(a1)=>DAT_8137c750
; pass interrupt number
80004560 02 40 20 21 move a0,s2
; call ISR via t2
80004564 01 40 f8 09 jalr t2
; delay slot
80004568 00 00 00 00 _nop
; $sp = *$sp
8000456c 8f bd 00 20 lw sp,0x20(sp)=>DAT_8196b468
; make a null frame
80004570 27 bd ff e0 addiu sp,sp,-0x20
80004574 00 40 90 21 move s2,v0
; $a1 = 0x8137c770 (hal_interrupt_objects)
80004578 3c 05 81 38 lui a1,0x8138
8000457c 24 a5 c7 70 addiu a1,a1,-0x3890
; address of object ptr
80004580 00 b1 28 20 add a1,a1,s1
; a1 = object ptr
80004584 8c a5 00 00 lw a1,0x0(a1)=>DAT_8137c770
; arg3 = saved register dump
80004588 02 00 30 21 move a2,s0
; call into C to finish off
8000458c 0c 38 c2 f2 jal interrupt_end
; put ISR result in arg0
80004590 00 40 20 21 _move a0,v0
; return value from isr
80004594 02 40 10 21 move v0,s2__default_exception_vsr
An annotated version of __default_exception_vsr assembly is provided below to help you dig even more into the subject.
default_exception_vsr:
; save ALL registers to the stack, including Hi and Low
800042e0 03 a0 d8 21 move k1,sp
800042e4 23 bd fe b0 addi sp,sp,-0x150
800042e8 af ba 00 88 sw k0,0x88(sp)
800042ec af a0 00 00 sw zero,0x0(sp)
800042f0 af a1 00 04 sw at,0x4(sp)
800042f4 af a2 00 08 sw v0,0x8(sp)
800042f8 af a3 00 0c sw v1,0xc(sp)
800042fc af a4 00 10 sw a0,0x10(sp)
80004300 af a5 00 14 sw a1,0x14(sp)
80004304 af a6 00 18 sw a2,0x18(sp)
80004308 af a7 00 1c sw a3,0x1c(sp)
8000430c af a8 00 20 sw t0,0x20(sp)
80004310 af a9 00 24 sw t1,0x24(sp)
80004314 af aa 00 28 sw t2,0x28(sp)
80004318 af ab 00 2c sw t3,0x2c(sp)
8000431c af ac 00 30 sw t4,0x30(sp)
80004320 af ad 00 34 sw t5,0x34(sp)
80004324 af ae 00 38 sw t6,0x38(sp)
80004328 af af 00 3c sw t7,0x3c(sp)
8000432c af b0 00 40 sw s0,0x40(sp)
80004330 af b1 00 44 sw s1,0x44(sp)
80004334 af b2 00 48 sw s2,0x48(sp)
80004338 af b3 00 4c sw s3,0x4c(sp)
8000433c af b4 00 50 sw s4,0x50(sp)
80004340 af b5 00 54 sw s5,0x54(sp)
80004344 af b6 00 58 sw s6,0x58(sp)
80004348 af b7 00 5c sw s7,0x5c(sp)
8000434c af b8 00 60 sw t8,0x60(sp)
80004350 af b9 00 64 sw t9,0x64(sp)
80004354 af bc 00 70 sw gp,0x70(sp)
80004358 af be 00 78 sw s8,0x78(sp)
8000435c af bf 00 7c sw ra,0x7c(sp)
80004360 00 00 20 10 mfhi a0
80004364 00 00 28 12 mflo a1
80004368 af a4 00 80 sw a0,0x80(sp)
8000436c af a5 00 84 sw a1,0x84(sp)
80004370 af bb 00 74 sw k1,0x74(sp)
; move values from coprocessor 0 into $t0-$t$6
80004374 40 08 68 00 mfc0 t0,Cause
80004378 40 09 60 00 mfc0 t1,Status
8000437c 40 0a 38 00 mfc0 t2,HWREna
80004380 40 0b 40 00 mfc0 t3,BadVAddr
80004384 40 0c 18 00 mfc0 t4,EntryLo1
80004388 40 0d 78 00 mfc0 t5,PRId
8000438c 40 0e 70 00 mfc0 t6,EPC
; save values $t0-$t6 onto the stack
80004390 af a8 00 98 sw t0,0x98(sp)
80004394 af a9 00 8c sw t1,0x8c(sp)
80004398 af aa 00 94 sw t2,0x94(sp)
8000439c af ab 00 9c sw t3,0x9c(sp)
800043a0 af ac 00 a4 sw t4,0xa4(sp)
800043a4 af ad 00 a0 sw t5,0xa0(sp)
800043a8 af ae 00 90 sw t6,0x90(sp)
; set global pointer ($gp) to 0x8161e5d0
800043ac 3c 1c 81 62 lui gp,0x8162
800043b0 27 9c e5 d0 addiu gp,gp,-0x1a30
; s0 = $sp
800043b4 03 a0 80 21 move s0,sp
; sp = $sp - 0x20
800043b8 23 bd ff e0 addi sp,sp,-0x20
; move status register from cp0 into $v0
; apply mask to $v0
; save $v0 back to cp0 status register
800043bc 40 02 60 00 mfc0 v0,Status
800043c0 3c 03 ff ff lui v1,0xffff
800043c4 34 63 ff f0 ori v1,v1,0xfff0
800043c8 00 43 10 24 and v0,v0,v1
800043cc 40 82 60 00 mtc0 v0,Status,0x0
800043d0 00 00 00 00 nop
800043d4 00 00 00 00 nop
800043d8 00 00 00 00 nop
; call cyg_hal_exception_handler
800043dc 0c 35 07 3d jal cyg_hal_exception_handlerStub Entry Vector (0x80000100)
The stub entry vector is supposedly located at 0x80000100, so let’s read 32 bytes from starting from there.
CM> read_memory -n 32 0x80000100
80000100: 40 1a 68 00 00 00 00 00 33 5a 00 7f 3c 1b 80 00 | @.h.....3Z..<...
80000110: 27 7b 03 00 03 7a d8 20 8f 7b 00 00 03 60 00 08 | '{...z. .{...`..The disassembly is exactly the same than the common vector:
rasm2 -a mips -b 32 -e -d '401a680000000000335a007f3c1b8000277b0300037ad8208f7b000003600008'
mfc0 k0, t5, 0
nop
andi k0, k0, 0x7f
lui k1, 0x8000
addiu k1, k1, 0x300
add k1, k1, k0
lw k1, (k1)
jr k1It’s a perfect match for this piece of assembly from eCos 2.0 source:
FUNC_START(utlb_vector)
mfc0 k0,cause # K0 = exception cause
nop
andi k0,k0,0x7F # isolate exception code
la k1,hal_vsr_table # address of VSR table
add k1,k1,k0 # offset of VSR entry
lw k1,0(k1) # k1 = pointer to VSR
jr k1 # go there
nop # (delay slot)
FUNC_END(utlb_vector)Similarly, this trampoline will fetch an address from the VSR table and jump to it.
Debug Vector (0x80000200)
Debug vectors are not used in production system, but let’s document it for completeness sake.
Let’s read the first 32 bytes starting at offset 0x80000200 and disassemble them with rasm2.
CM> read_memory -n 32 0x80000200
80000200: 40 1a 68 00 3b 5a 01 00 40 9a 68 00 3c 1a 81 32 | @.h.;Z..@.h.<..2
80000210: 8f 5a 88 58 8f 5a 00 00 8f 5b 00 00 13 60 00 03 | .Z.X.Z...[...`..
80000220: 00 00 00 00 42 00 00 18 00 00 00 00 8f 5d 00 08 | ....B........]..
80000230: 8f 5b 00 0c 40 9b 70 00 03 40 20 21 00 00 00 0f | .[..@.p..@ !....Disassembly:
rasm2 -a mips -b 32 -e -d '401a68003b5a0100409a68003c1a81328f5a88588f5a00008f5b0000136000030000000042000018000000008f5d00088f5b000c409b7000034020210000000f'
mfc0 k0, t5, 0 ; move from coprocessor 0
xori k0, k0, 0x100 ;
mtc0 k0, t5, 0 ; move to coprocessor 0
lui k0, 0x8132 ; load unsigned integer to $k0
lw k0, -0x77a8(k0) ; load value from 0x81318858 into $k0
lw k0, (k0) ;
lw k1, (k0) ;
beqz k1, 0x2c ; branch to $k1
nop
eret ; return from interrupt
nopThis is similar to the assembly, although a little more convoluted:
FUNC_START(debug_vector)
la k0,32*4
la k1,hal_vsr_table # Get VSR table
lw k1,32*4(k1) # load debug vector
jr k1 # go there
nop # (delay slot)
FUNC_END(debug_vector)Virtual Vector Table (0x80000400)
“Virtual vectors” is the name of a table located at a static location in the target address space. This table contains 64 vectors that point to service functions or data. The fact that the vectors are always placed at the same location in the address space means that both ROM and RAM startup configurations can access these and thus the services pointed to. The primary goal is to allow services to be provided by ROM configurations (ROM monitors such as RedBoot in particular) with clients in RAM configurations being able to use these services. Without the table of pointers this would be impossible since the ROM and RAM applications would be linked separately - in effect having separate name spaces - preventing direct references from one to the other. This decoupling of service from client is needed by RedBoot, allowing among other things debugging of applications which do not contain debugging client code (stubs).
Source: https://ecos.sourceware.org/ecos/docs-latest/ref/hal-calling-if.html
The virtual vectors table is initialized by the hal_if_init function. A simplified decompiled version from an actual firmware is provided below:
void hal_if_init(void)
{
int address_index;
int index;
index = 0;
address_index = 0;
do {
*(undefined4 *)(&DAT_80000400 + address_index) = 0x80d97fb8;
index = index + 1;
address_index = index * 4;
} while (index < 0x40);
_DAT_80000400 = 0x80015; //set virtual version table version
_DAT_80000440 = FUN_80d97f68; // reset
_DAT_80000410 = &LAB_80d97f80; // kill
_DAT_80000448 = &LAB_80d97ecc; // microsecond delay
_DAT_80000420 = &LAB_80d982f0; // flush instruction cache
_DAT_8000041c = &LAB_80d98308; // flush data cache
_DAT_8000044c = 0; // debug data
_DAT_80000438 = 0; // set serial baud rate
_DAT_80000430 = set_debug_comm; // set debug communication channel
_DAT_80000434 = set_console_comm; // set console communication channel
_DAT_80000444 = 0; // console interrupt flag
return;What the function does is initializing the virtual vector table by setting all entries in the vector table so that they point to the function at offset 0x80d97fb8.
The function at 0x80d97fb8 is what I call nop_service:
undefined nop_service()
80d97fb8 03 e0 00 08 jr ra
80d97fbc 00 00 10 21 _clear v0When all entries are initialized, the code set specific entries.
To understand these specific entries, we can look at the diagram below (inspired by “Embedded Software Development with eCos” by Anthony J. Massa).
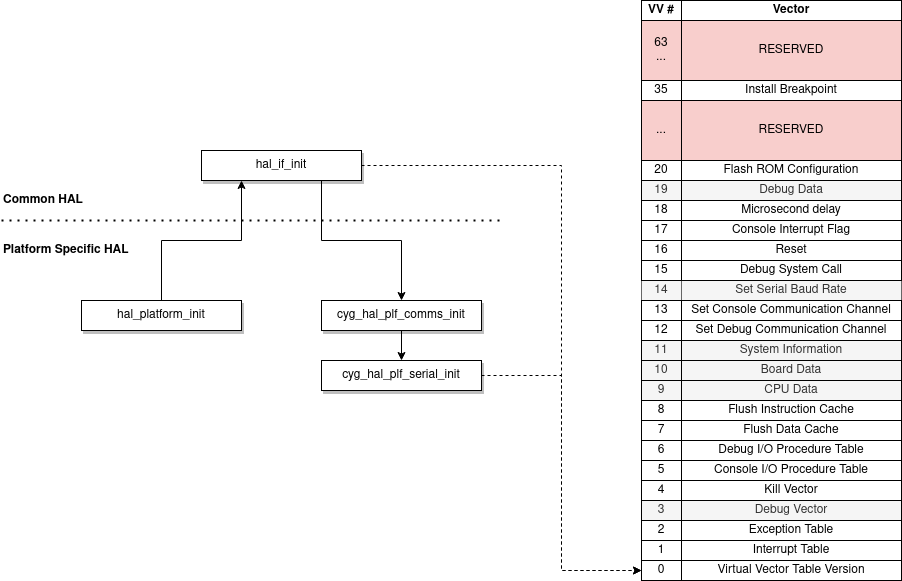
Supposedly, this is how the VVT version is built:
This value contains the total number of virtual vectors in the upper 16 bits, and the definition number of the last supported virtual vectors in the lower 16 bits. For this VVT, the total number of virtual vectors is 64d (0x40), and the definition number of the last virtual vector, Flash ROM Configuration, is 20d (0x14). The version is therefore 0x4014 (edit: actually 0x00400014).
Here, the virtual vector table version is set to 0x00080015.
The definition number of the last vector, Flash ROM Configuration is 21d (0x15). The total number of virtual vectors in the upper 16 bits should be 64d (0x40), but is actually 8d (0x8). It’s highly probable that Broadcom changed the initial eCos behavior. We can still rely on the lower 16 bits though.
To interact with the VVT, I wrote a piece of Python code that lists the entries from a live system by fetching the information over serial.
python3 dump_vector_table.py
0x80000400 Virtual Vector Table Version 0x80015
0x80000404 Interrupt Table 0x80d97fb8 (nop)
0x80000408 Exception Table 0x80d97fb8 (nop)
0x8000040c Debug Vector 0x80d97fb8 (nop)
0x80000410 Kill Vector 0x80d97f80
0x80000414 Console I/O Procedure Table 0x81967908
0x80000418 Debug I/O Procedure Table 0x81967908
0x8000041c Flush Data Cache 0x80d98308
0x80000420 Flush Instruction Cache 0x80d982f0
0x80000424 CPU Data 0x80d97fb8 (nop)
0x80000428 Board Data 0x80d97fb8 (nop)
0x8000042c System Information 0x80d97fb8 (nop)
0x80000430 Set Debug Communication Channel 0x80d97fc0
0x80000434 Set Console Communication Channel 0x80d98230
0x80000438 Set Serial Baud Rate 0x0
0x8000043c Debug System Call 0x80d97fb8 (nop)
0x80000440 Reset 0x80d97f68
0x80000444 Console Interrupt Flag 0x0
0x80000448 Microsecond delay 0x80d97ecc
0x8000044c Debug Data 0x812b2894
0x80000450 Flash ROM Configuration 0x80d97fb8 (nop)
0x80000454 RESERVED 0x80d97fb8 (nop)
0x80000458 RESERVED 0x80d97fb8 (nop)
0x8000045c RESERVED 0x80d97fb8 (nop)
0x80000460 RESERVED 0x80d97fb8 (nop)
0x80000464 RESERVED 0x80d97fb8 (nop)
0x80000468 RESERVED 0x80d97fb8 (nop)
0x8000046c RESERVED 0x80d97fb8 (nop)
0x80000470 RESERVED 0x80d97fb8 (nop)
0x80000474 RESERVED 0x80d97fb8 (nop)
0x80000478 RESERVED 0x80d97fb8 (nop)
0x8000047c RESERVED 0x80d97fb8 (nop)
0x80000480 RESERVED 0x80d97fb8 (nop)
0x80000484 RESERVED 0x80d97fb8 (nop)
0x80000488 RESERVED 0x80d97fb8 (nop)
0x8000048c Install breakpoint 0x80d97fb8 (nop)
0x80000490 RESERVED 0x80d97fb8 (nop)
0x80000494 RESERVED 0x80d97fb8 (nop)
0x80000498 RESERVED 0x80d97fb8 (nop)
0x8000049c RESERVED 0x80d97fb8 (nop)
0x800004a0 RESERVED 0x80d97fb8 (nop)
0x800004a4 RESERVED 0x80d97fb8 (nop)
0x800004a8 RESERVED 0x80d97fb8 (nop)
0x800004ac RESERVED 0x80d97fb8 (nop)
0x800004b0 RESERVED 0x80d97fb8 (nop)
0x800004b4 RESERVED 0x80d97fb8 (nop)
0x800004b8 RESERVED 0x80d97fb8 (nop)
0x800004bc RESERVED 0x80d97fb8 (nop)
0x800004c0 RESERVED 0x80d97fb8 (nop)
0x800004c4 RESERVED 0x80d97fb8 (nop)
0x800004c8 RESERVED 0x80d97fb8 (nop)
0x800004cc RESERVED 0x80d97fb8 (nop)
0x800004d0 RESERVED 0x80d97fb8 (nop)
0x800004d4 RESERVED 0x80d97fb8 (nop)
0x800004d8 RESERVED 0x80d97fb8 (nop)
0x800004dc RESERVED 0x80d97fb8 (nop)
0x800004e0 RESERVED 0x80d97fb8 (nop)
0x800004e4 RESERVED 0x80d97fb8 (nop)
0x800004e8 RESERVED 0x80d97fb8 (nop)
0x800004ec RESERVED 0x80d97fb8 (nop)
0x800004f0 RESERVED 0x80d97fb8 (nop)
0x800004f4 RESERVED 0x80d97fb8 (nop)
0x800004f8 RESERVED 0x80d97fb8 (nop)
0x800004fc Virtual Vector Table 0x80d97fb8 (nop)Conclusion
If you made it through here, congratulations ! Our acquired understanding of the inner workings of eCos interrupt/exception handling and dedicated vector tables will be helpful in the future when we try to inject GDB stubs into running production firmware. This will also prove useful when we will be designing backdoor persistence by hijacking vector table entries.
As always, if you have any question feel free to contact me via Twitter or email.
Tagged #ecos, #memory, #reversing.